Робототехника-2009. Чему научились машины
009 год, вероятно, нельзя назвать прошедшим под знаком роботов – прогресс в этой области не настолько велик, чтобы затмить остальные события технологической индустрии. В то же время в отсутствии достижений работающих в этой области исследователей упрекнуть также невозможно: пусть роботы не сравнялись с человеком по уровню интеллекта или способности выполнять множество разнообразных задач собственными руками, но они сделали несколько больших шагов на пути к этим целям.

Важной областью исследований являлась социализация роботов. Многие учёные верят, что наделение машин соответствующими навыками увеличит их шансы на принятие обществом в качестве помощников в частных домах, школах, офисах и медицинских учреждениях. Например, Андреа Томас (Andrea Thomaz) создала робота, который может обучаться простым заданиям вроде перемещения предметов путём распознавания отдаваемых человеком команд, в которых используются устные инструкции, знаки и эмоции.

Робот, разработанный в Университете Карнеги-Меллона (Carnegie Mellon University), умеет «поддерживать разговор» через визуальный контакт с людьми, переключая внимание с одного собеседника на другого перемещением взгляда.

А робот Einstein («Эйнштейн») из Калифорнийского университета (University of California) в Сан-Диего ориентирован на выражение как можно более правдоподобных эмоций. Причём совершенствует он свою мимику сам, глядя в зеркало и анализируя, как включение тех или иных моторов влияет на движения частей лица.
Впрочем, обучают искусственный интеллект не только взаимодействию с людьми и помощи им, но и нападению (пока на виртуальные цели). Учёные из Сеула придумали алгоритм действий, позволяющий скрываться в тени и за неподвижными объектами, чтобы в нужный момент атаковать цель. Более того, прорабатывается и такой вопрос, как способность роботов обманывать.

В эксперименте учёных из Федеральной политехнической школы Лозанны (Ecole Polytechnique Federale de Lausanne, EPFL) небольшие машины с камерами и световыми сигналами программировались на поиск «пищи» – цветного кольца. Второе кольцо являлось «ядом». Прибыв к «провианту», каждый должен был сигнализировать об успешной миссии, чтобы к «трапезе» могли присоединиться остальные. Но поскольку всем места у кольца не хватало, через несколько поколений «эволюции» (имитировавшейся внесением случайных изменений в программный код) некоторые роботы научились не включать сигнал.
Чтобы робот не появлялся на глаза в неподходящий момент, его можно просто выключить, но и обязанности свои он выполнять не будет. Компромиссом является возможность определения самой машиной, когда у человека, например, скверное настроение. Исследователи из Университета Калгари (University of Calgary) изобрели устройство, которое будучи помещённым на голову считывает эмоции через анализ биоэлектрической активности мышц и передаёт команды роботу. Правда, пока в качестве последнего выступает модифицированный «пылесос» Roomba.
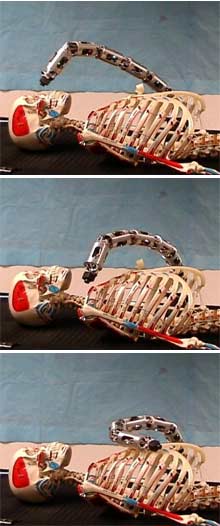
Не стоит прогресс и в медицинской сфере. Например, робот исследователей из Университете Карнеги-Меллона проверяет, дышит ли человек, и оказывает помощь в получении его лёгкими кислорода с помощью специализированной маски. А поскольку механизм разработан в виде подвижных сегментов, соединённых «змейкой», расположенные в её «голове» сенсоры, в том числе ультразвуковой, позволяют дистанционно обследовать практически любую часть тела, что очень ценно в условиях боевых действий.

Важно для роботов и умение ловить, поднимать и удерживать предметы руками. Разработка подобных систем не только совершенствует самих андроидов, но также способствует инновациям в области протезов. Исследователи из Колумбийского университета (Columbia University) обнаружили, что если механическую руку ограничить в движениях так же, как ограничена в возможностях человеческая, тогда устройство получается более эффективным. Работа также показала, что алгоритмы управления лимитированной конечностью довольно просты и не требуют большой вычислительной мощности.

Передвижение самих роботов – это чрезвычайно сложная задача, особенно если речь идёт об андроидах. Однако порой требования несколько иные и подразумевают самостоятельно преодолевающую большие расстояния «грузовую» машину. Таковой является BigDog («Большая собака») – что-то отдалённо напоминающее вьючное животное. BigDog от Boston Dynamics может переносить до 150 кг по льду, песку, холмам и ориентируется по GPS. О его двуногом и более похожим движениями на человека варианте Petman мы уже .

Интересной идеей является Chembot, буквально изменяющий свой размер благодаря наполнению отдельных частей оболочки особой конструкции воздухом или его удалению. Конечно, на робота в традиционном понимании он мало похож, но курирующая разработку DARPA (Defense Advanced Research Projects Agency — Агентство передовых оборонных исследовательских проектов) рассчитывает, что устройство когда-нибудь сможет проникать в здания через небольшие отверстия и щели. Разумеется, находящихся в различных стадиях проектов ещё многие десятки, если не сотни. Какие-то из них продолжат развиваться в 2010 году, другие найдут место на полках до лучших времён, но индустрию робототехники без сомнений ждёт очень яркое будущее.
Источник:
Важной областью исследований являлась социализация роботов. Многие учёные верят, что наделение машин соответствующими навыками увеличит их шансы на принятие обществом в качестве помощников в частных домах, школах, офисах и медицинских учреждениях. Например, Андреа Томас (Andrea Thomaz) создала робота, который может обучаться простым заданиям вроде перемещения предметов путём распознавания отдаваемых человеком команд, в которых используются устные инструкции, знаки и эмоции.
Робот, разработанный в Университете Карнеги-Меллона (Carnegie Mellon University), умеет «поддерживать разговор» через визуальный контакт с людьми, переключая внимание с одного собеседника на другого перемещением взгляда.
А робот Einstein («Эйнштейн») из Калифорнийского университета (University of California) в Сан-Диего ориентирован на выражение как можно более правдоподобных эмоций. Причём совершенствует он свою мимику сам, глядя в зеркало и анализируя, как включение тех или иных моторов влияет на движения частей лица.
Впрочем, обучают искусственный интеллект не только взаимодействию с людьми и помощи им, но и нападению (пока на виртуальные цели). Учёные из Сеула придумали алгоритм действий, позволяющий скрываться в тени и за неподвижными объектами, чтобы в нужный момент атаковать цель. Более того, прорабатывается и такой вопрос, как способность роботов обманывать.
В эксперименте учёных из Федеральной политехнической школы Лозанны (Ecole Polytechnique Federale de Lausanne, EPFL) небольшие машины с камерами и световыми сигналами программировались на поиск «пищи» – цветного кольца. Второе кольцо являлось «ядом». Прибыв к «провианту», каждый должен был сигнализировать об успешной миссии, чтобы к «трапезе» могли присоединиться остальные. Но поскольку всем места у кольца не хватало, через несколько поколений «эволюции» (имитировавшейся внесением случайных изменений в программный код) некоторые роботы научились не включать сигнал.
Чтобы робот не появлялся на глаза в неподходящий момент, его можно просто выключить, но и обязанности свои он выполнять не будет. Компромиссом является возможность определения самой машиной, когда у человека, например, скверное настроение. Исследователи из Университета Калгари (University of Calgary) изобрели устройство, которое будучи помещённым на голову считывает эмоции через анализ биоэлектрической активности мышц и передаёт команды роботу. Правда, пока в качестве последнего выступает модифицированный «пылесос» Roomba.
Не стоит прогресс и в медицинской сфере. Например, робот исследователей из Университете Карнеги-Меллона проверяет, дышит ли человек, и оказывает помощь в получении его лёгкими кислорода с помощью специализированной маски. А поскольку механизм разработан в виде подвижных сегментов, соединённых «змейкой», расположенные в её «голове» сенсоры, в том числе ультразвуковой, позволяют дистанционно обследовать практически любую часть тела, что очень ценно в условиях боевых действий.
Важно для роботов и умение ловить, поднимать и удерживать предметы руками. Разработка подобных систем не только совершенствует самих андроидов, но также способствует инновациям в области протезов. Исследователи из Колумбийского университета (Columbia University) обнаружили, что если механическую руку ограничить в движениях так же, как ограничена в возможностях человеческая, тогда устройство получается более эффективным. Работа также показала, что алгоритмы управления лимитированной конечностью довольно просты и не требуют большой вычислительной мощности.
Передвижение самих роботов – это чрезвычайно сложная задача, особенно если речь идёт об андроидах. Однако порой требования несколько иные и подразумевают самостоятельно преодолевающую большие расстояния «грузовую» машину. Таковой является BigDog («Большая собака») – что-то отдалённо напоминающее вьючное животное. BigDog от Boston Dynamics может переносить до 150 кг по льду, песку, холмам и ориентируется по GPS. О его двуногом и более похожим движениями на человека варианте Petman мы уже .
Интересной идеей является Chembot, буквально изменяющий свой размер благодаря наполнению отдельных частей оболочки особой конструкции воздухом или его удалению. Конечно, на робота в традиционном понимании он мало похож, но курирующая разработку DARPA (Defense Advanced Research Projects Agency — Агентство передовых оборонных исследовательских проектов) рассчитывает, что устройство когда-нибудь сможет проникать в здания через небольшие отверстия и щели. Разумеется, находящихся в различных стадиях проектов ещё многие десятки, если не сотни. Какие-то из них продолжат развиваться в 2010 году, другие найдут место на полках до лучших времён, но индустрию робототехники без сомнений ждёт очень яркое будущее.
Источник:
Комментарии (0)
RSS свернуть / развернутьТолько зарегистрированные и авторизованные пользователи могут оставлять комментарии.